طبق تعریف ، فتوگرامتری از راه دور (CRP) به سادگی جمع آوری و پردازش داده های فتوگرامتری است. که در آن سوژه در فاصله کمتر از 1000 فوت قرار دارد. روشهای جمع آوری می تواند هم زمینی باشد و هم هوایی ، و خروجی نهایی را می توان به صورت دو یا سه بعدی ارائه داد.
عوامل متعددی این ابزار را به یک ابزار قدرتمند برای متخصصان زمین فضایی تبدیل کرده است. قوی ترین آنها ظهور اخیر فتوگرامتری سه بعدی است که اغلب به عنوان "فتوگرامتری چند اشعه" نامیده می شود. تکنیکی که عکسهای همپوشانی و استریو را گرفته و آنها را به ابرهای نقطه ای سه بعدی تبدیل می کند. این ابرهای نقطه ای را می توان از طریق همان نرم افزار مورد استفاده برای اسکن سه بعدی پردازش کرد. Autodesk’s ReCap نمونه ای از این نرم افزار است
در صورت نیاز به مشاوره می توانید از طریق این شماره با ما در تماس باشید: 09128571822
فتوگرامتری چیست؟
نقشه برداری برد کوتاه فتوگرامتری، علم اندازه گیری از روی عکس است. ورودی فتوگرامتری عکس است و خروجی آن معمولاً نقشه ، نقشه ، اندازه گیری یا مدل سه بعدی برخی از اجسام یا صحنه های واقعی است. بسیاری از نقشه هایی که امروزه استفاده می کنیم با فتوگرامتری و عکس های گرفته شده از هواپیما ایجاد شده است.
انواع فتوگرامتری
فتوگرامتری را می توان به چند طریق طبقه بندی کرد ، اما یک روش استاندارد این است که میدان را بر اساس موقعیت دوربین در حین عکاسی تقسیم کنید. بر این اساس ما فتوگرامتری هوایی و فتوگرامتری زمینی (یا محدوده نزدیک) داریم. نقشه برداری برد کوتاه فتوگرامتری
در فتوگرامتری هوایی ، دوربین در هواپیما نصب می شود و معمولاً به صورت عمودی به سمت زمین نشانه رفته است. همزمان با پرواز هواپیما در مسیر پرواز ، چندین عکس از روی زمین گرفته می شود. این هواپیماها به طور سنتی با هواپیماهای بدون سرنشین ثابت پرواز می کردند. اما بسیاری از پروژه ها اکنون با پهپادها و پهپادها انجام می شود. به طور سنتی این عکسها در یک پلاتر استریو. (ابزاری که به اپراتور اجازه می دهد همزمان دو عکس را در نمای استریو ببیند) پردازش می شوند. اما اکنون اغلب توسط سیستم های رومیزی خودکار پردازش می شوند.
در فتوگرامتری زمینی و برد نزدیک ، دوربین بر روی زمین قرار دارد و دستی ، سه پایه یا تیر نصب شده است. معمولاً این نوع فتوگرامتری غیر توپوگرافی است. یعنی خروجی محصولات توپوگرافی مانند مدل های زمین یا نقشه های توپوگرافی نیست. بلکه نقشه ها ، مدل های سه بعدی ، اندازه گیری ها یا ابرهای نقطه ای است. دوربین های روزمره برای مدل سازی و اندازه گیری ساختمان ها ، سازه های مهندسی. صحنه های پزشکی قانونی و تصادف ، معادن ، کارهای زمین ، شمع های انبار ، آثار باستانی ، مجموعه فیلم و غیره استفاده می شود. -مدلسازی پایه. (منبع)
تعریفی دیگر از فوتوگرامتری
طبق تعریف ، نقشه برداری برد کوتاه فتوگرامتری، از راه دور (CRP) به سادگی جمع آوری و پردازش داده های فتوگرامتری است. که در آن سوژه در فاصله کمتر از 1000 فوت قرار دارد. روشهای جمع آوری می تواند هم زمینی باشد و هم هوایی ، و خروجی نهایی را می توان به صورت دو یا سه بعدی ارائه داد.
عوامل متعددی این ابزار را به یک ابزار قدرتمند برای متخصصان زمین فضایی تبدیل کرده است. قوی ترین آنها ظهور اخیر فتوگرامتری سه بعدی است که اغلب به عنوان “فتوگرامتری چند اشعه” نامیده می شود. تکنیکی که عکسهای همپوشانی و استریو را گرفته و آنها را به ابرهای نقطه ای سه بعدی تبدیل می کند. این ابرهای نقطه ای را می توان از طریق همان نرم افزار مورد استفاده برای اسکن سه بعدی پردازش کرد. Autodesk’s ReCap نمونه ای از این نرم افزار است.
استفاده گسترده از UAS
یکی دیگر از عوامل افزایش علاقه و استفاده از CRP استفاده گسترده از UAS است. اکثریت قریب به اتفاق پروژه های UAS تنها بر CRP تکیه می کنند. از آنجایی که این فناوری می تواند از دوربین های دیجیتال خارج از قفسه با قیمت مناسب استفاده کند ، فتوگرامتری سه بعدی هزینه های سخت افزاری را در مقایسه با اسکن لیزری سه بعدی کاهش می دهد. علاوه بر این ، دوربین های دیجیتال استاندارد هم کوچکتر و هم سبک تر از اسکنرهای سه بعدی معمولی هستند ، که آنها را برای استفاده در سیستم عامل های UAS ایده آل می کند.
کاربردهای این فناوری فراوان است. فراتر از نقشه برداری هوایی UAS ، صنعت معدن از CRP استفاده می کند. تجزیه و تحلیل سایت معدن حجمی نمونه ای از جایی است که CRP می تواند یک راه حل سریع و مقرون به صرفه ارائه دهد. کاهش سقوط سنگ یکی دیگر از برنامه های کاربردی است. در اصل ، هر برنامه ای که نیازی به اسکن لیزری با دقت بالا ندارد ، می تواند کاندید فناوری CRP باشد.
اخیراً CRP ، به ویژه در ارتباط با فتوگرامتری سه بعدی ، با پروژه تانگو مورد توجه گوگل قرار گرفته است. تانگو که هنوز در حال توسعه است ، دوربین های معمولی ، حسگر عمق (مشابه MS Kinect) و حسگر حرکت را در تلفن هوشمند اندرویدی گنجانده است. در نتیجه یک تلفن هوشمند قادر به جمع آوری داده های سه بعدی و تولید تصاویر سه بعدی خواهد بود. (دیدگاه یکی از محققان در مورد اتفاقات تانگو را اینجا ببینید.) دو شریک در تانگو ، ماترپورت و پاراکوسم ، قبلاً محصولاتی را با استفاده از این فناوری عرضه کرده اند. در حالی که این دستگاه ها به عملکرد و دقت اسکنرهای پیشرفته مبتنی بر لیزر نزدیک نمی شوند ، می توانند برای پروژه های تجسم مفید بوده و نگاهی اجمالی به این هدف داشته باشند.

1. برنامه ریزی و آماده سازی
مرحله اول مرحله ابتدایی این مطالعه است. در این مرحله دو فرایند دخیل است که عبارتند از: برنامه ریزی پرواز و آماده سازی تجهیزات و مواد. برنامه ریزی پرواز مهم و ضروری است. و باید با دقت و مرتب اجرا شود زیرا هر گونه اشتباهی در هنگام برنامه ریزی پرواز رخ می دهد. پهپاد سقوط کرد و جریان کل مطالعه را قطع کرد. چندین عنصر باید در طول مورد توجه قرار گیرد. تدوین برنامه ریزی پرواز مانند ارتفاع پرواز، نقاط مسیر، سرعت و موارد دیگر. همه این عناصر
باید به درستی تنظیم شود تا اطمینان حاصل شود که همه عکس های هوایی با موفقیت به دست آمده اند. به عنوان مثال عکس هوایی باید 60٪ دور دور و 30٪ دور پایانی همپوشانی داشته باشد. فرآیند دیگری که در مرحله اول دخیل است مرحله در حال آماده سازی تجهیزات و مواد مورد نیاز در این مطالعه مانند دیجیتال است. دوربین ، ایستگاه توتال ، هگزاکوپتر-پهپاد و دقیقا.
2. جمع آوری داده ها
مرحله دوم شامل جمع آوری داده های عکس هوایی ، ایجاد نقطه کنترل زمین است. (GCP) و نقطه بازرسی (CP). عکس هوایی با استفاده از دوربین دیجیتال که روی آن نصب شده است ، گرفته می شود. هگزاکوپتر-پهپاد 21 عکس هوایی با موفقیت در طول مأموریت پرواز به دست آمده است ، اما فقط 3 عکس. عکس هوایی مورد استفاده برای پردازش داده ها علاوه بر این ، حدود 40 GCP و 6 CP با استفاده از آنها ایجاد می شود
کل ایستگاه GCP در جهت گیری بیرونی استفاده می شود در حالی که CP از آن برای ارزیابی دقت استفاده می شود. GCP همچنین برای انجام مثلث بندی هوایی (AT) استفاده می شود. دوربین نیز باید کالیبره شود. برای به دست آوردن پارامتر دوربین و این داده ها برای جهت گیری داخلی استفاده می شود. تعداد زیادی وجود دارد. برای کالیبراسیون دوربین دیجیتال می توان از روش هایی استفاده کرد. و روش مورد استفاده در این تحقیق بسته بندی است
تعدیل.
3. پردازش داده ها
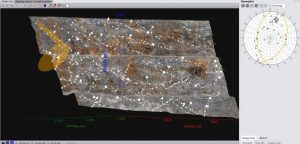
پردازش داده ها شامل جهت گیری داخلی و خارجی و انجام AT است. تمام فرآیندها با استفاده از نرم افزار AgiSoft انجام می شود. جهت گیری داخلی و خارجی باید به صورت متوالی اجرا شود. به طور کلی ، هدف جهت گیری داخلی ایجاد طرح هندسی پرتو دقیقاً به عنوان یک هندسه اصلی است.
در همین حال ، جهت گیری بیرونی برای حذف y-parallax و تشکیل مدل استریوسکوپی سه بعدی انجام می شود. پس از شکل گیری مدل استریوسکوپی سه بعدی ، DTM می تواند تولید شود. متعاقباً ، می توان عکس orthophoto ایجاد کرد. در این مطالعه ، سه عکس ارتوپدی جداگانه ایجاد شد و بعداً همه آنها موزاییک شدند تا یک واحد ایجاد کنند (شکل 3). این یک عکس عکاسی است که تمام رودخانه را پوشش می دهد.
از دیگر خدمات نقشه برداری به این موارد میتوان اشاره کرد: